Servo Motor Tamiri

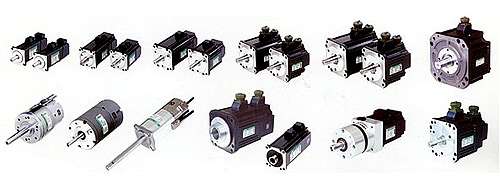





















TÜM MARKA SERVO MOTORLAR VE SÜRÜCÜLERİ UZMAN EKİBİMİZLE İTİNA İLE EN KISA SÜREDE YAPILIR. TAMİRLERİ YAPILAN ÇEŞİTLİ SERVO MOTOR RESİMLERİ:
Firmamızın atölyesinde bulunan teknolojik cihazlar ve 1978 yılından buyana elde etmiş olduğumuz bilgi ve birikim ile kullanmış olduğunuz, işlevsel aksaklıklar gösteren servo motorlarınızı, gelişmiş testler ve aşamalardan geçirerek tamirini, bakımı ve onarımını marka ayırt etmektesizin özenli ve garantili bir şekilde yapmaktayız.
- Enkoder arızası
- Balans sapması
- Kararsız çalışma
- Servo mıknatıs tamiri
- Rulman değişimi
- Manyetik alan kaybı
- Fren kaplini arızası
- Aşırı akım çekme
- Kırık, vuruk darbeye bağlı arıza
- Sargılarda indüktif kayıp, yanma veya kısa devre
- Resolver tamiri,
- Enkoder pozisyon tespiti hassas ayarı
TAMİRİ YAPILAN SERVO MOTOR MARKALARI
- MİTSUBİSHİ
- PANASONIC
- OMRON
- YASKAWA
- DELTA
- TELEMEKANİK
- SCHNEİDER
- SİEMENS
- BAUMULLER
- LS
- FUJİ
- İNVT
- NUM
- ABB
- ALLEN BRADLEY
- FANUC
- GEFRAN
- KOLLMORGEN
- LENZE
- PARVEX
- SEM
- SİPRO
- TOSHİBA
- PİLZ
- BALDOR
- SAMSUNG
- DAEWOO
- ELECTROCRAFT
- PARKER
- NANOTECH
- SANYO DENKİ
- EMERSON
- DUNKER MOTOREN
- FESTO
- INDRAMAT
- LAFERT
- MAGNETİC
- MOOG
- SEW
- SMI
- DAİKİN
- CONTROL TESCHNİQUES
- LG-OTİS
- AMK
- DANAHER MOTİON
- EUROTHERM
- KEB
- ORMEC
- JETTER
- SCM
- MGMEET
SERVO MOTORLAR Servo motorlar gönderilen kodlanmış sinyaller ile şaftları özel bir açısal pozisyonda döndürülebilen motorlardır. Kodlanmış sinyal servo motorun girşine uygulandığı sürece servo motor şaftın açısal pozisyonunu korur. Kodlanmış sinyal değiştirilirse şaftın açısal pozisyonu da değişir.
Servo motorlar çeşitli robot projelerinde, robot kollarda, uzaktan kumandalı uygulamalarda sıklıkla kullanılır. Aynı zamanda yüksek güçlü servo motorlar endüstriyel otomasyonlarda da kullanılabilir.
 Temel Prensip:
Temel Prensip:
Bir servo motorun temel konfigürasyonu şekilde gösterilmektedir. Bir DC motor yüksek redüksiyon oranına sahip bir dişli kutusunu hareket ettirir. Sondaki şaft çok yavaş bir hızla dönerek dönme ekseni üzerindeki potansiyometreyi de çevirir. Potansiyometrenin amacı geri besleme yaparak servo motorun şaftının pozisyonun algılanmasını sağlamaktır. Potansiyometre algılanan pozisyona karşılık gelen voltajı, voltaj karşılaştırıcısı olarak kullanılan opampa gönderir. Bu voltaj değerinin, şaftın istenilen pozisyonunu belirleyen giriş voltajı ile karşılaştırılması ile karşılaştırcının çıkış voltajı belirlenir. Bu çıkış voltajı, motor şaftını girişte uygulanan sinyala karşılık gelen açuya uyması için gerekli yönde hareket ettirecek gücü sağlar.
Standart Konfigürasyon:Bir servo motorun şaftının pozisyonunu kontrol etmenin bir diğer yolu kodlanmış bir sinyal kullanmaktır. Bu metot uzaktan kumandalı uygulamalarda kullanılan standart servolarda sıklıkla kullanılır.
Servonun kontrol girişine 18 ms periyotlu palslardan oluşan bir sinyal gönderilir. Palsın süresi servo motorun şaftının 180º 'lik bir aralıktaki pozisyonunu belirler. Eğer pals 1,5 ms uzunluğunda ise servo motorun şaftının pozisyonu 180 º 'lik aralığın ortasındadır. Pals 1 ms uzunlukta ise servo motor 90 º sola, 2 ms uzunlukta ise 90 º sağa hareket eder.
Bazı servo motorların pals uzunluğu aralığı 1,25 ms ile 1,75 ms arasındadır. Bu durumda pals uzunluğu 1,5 ms iken servo motor şaftı ortadadır. Pals uzunluğu 1,25 ms iken 90 º sola, 1,75 ms iken ise 90 º sağa hareket eder.
Servo Motor Çeşitleri:
Standart servo motorların üç kablosu vardır. Bunlardan biri power (4 V ile 6 V arasında), biri toprak, diğeri ise kontrol girişi içindir. Kabloların renkleri ise genellikle power için kırmızı, toprak için siyah ve kontrol için beyazdır.
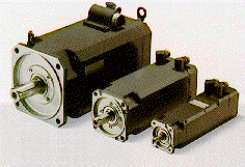
Servo motorların boyutları ve şekilleri planlanan uygulamaya bağlıdır. Yandaki resimdeki servo motor ve benzerleri robotikte sık kullanılan servo motor tipleridir. Bunlar düşük güçte çalışabilir, kullanılan servo motorun karakteristik özelliklerine ve uygulamaya bağlı olarak 100 mA ile 2A aralığındaki DC voltaj kaynakları ile beslenebilirler.
Endüstriyel ve mobil uygulamalarda kullanılan AC voltaj ile çalışan servo motorlar da vardır.
Servo Motor Tamir Süreci
Fiziksel ve görsel kontroller yapılır Gövdesinde kırılma çatlama, bağlantı soketlerinde ve pinlerinde bir hasar olup olmadığı kontrol edilir. servo motor, dinamik testler yapılması amaçlı, dinamik test makinasına bağlanır, mekanik ve magnetik alan kaybı olup olmadığı tespit edilir. Rejeneratif elektriksel testler yapılarak servo motorun sargılarında, statör manyetik alanında ve rotor manyetik alanında güç kaybı olup olmadığı tespit edilir.
SPİNDLE MOTORLAR HAKKINDA:
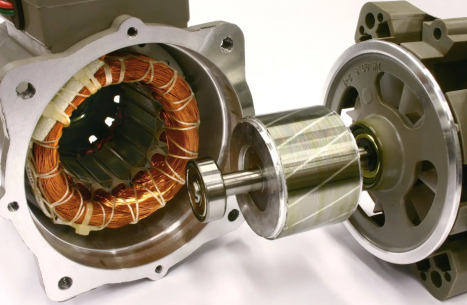
Spindle motor diğer daimi mıknatıslı motorlardan farklı bir motordur. Özellikle bu farkı rotorundan ve yapmış olduğu işten kaynaklanmaktadır. Daimi mıknatıslı motorların rotor manyetik alanını üzerlerinde bulunan daimi mıknatıslar oluştururken spindle motorun rotor manyetik alanını sincap kafesli bir döner transformatör oluşturmaktadır. Bu durumun gerekçesi ise spindle motorlar çok ani yön değiştirme hareketleri ve bu yön değiştirme hareketlerinde diğer manyetik eksen motorlarına oranla daha yüksek ağırlıktaki yükleri taşıdığı için zaman zaman çok yüksek demeraj(kalkış akımı) ve rejeneratif(durdurma akımı) akımlara maruz kalmalarıdır. Bu nedenle durma ve kalkma noktaları ile pozisyon yapıları diğer servo motorlar kadar hassas değildir bu nedenle hasassiyet açısından zayıf güç açısından daha üstün bir motordur.
Enkoder Tamiri Nasıl Yapılır?
Tamir için gelen bir enkoder ilk önce optik ve mekanik olarak kontrol edilir Enkoderin rahatça mil ekseni üzerinde dönmesi sağlanır ve varsa mekanik sorunları giderilir. Enkoder mekanik test makinesine bağlanır aynı anda enkoderin çalışması için uygun gerilim tatbik edilir. Enkoder gerekli hızlarda döndürülmek suretiyle, üretmesi gereken geri dönüş bilgilerini ( elektriksel pulse) üretip üretmediğini osiloskop ile kontrol edilir. Enkoderin işlevine göre, yapılacak açısal ayarları varsa kontrol edilir ve açısal ayarlar yapılır. Bu evreden önce, elektronik kart üzerinde sinyal çıkışını engelleyen optik veya elektronik malzemeler varsa değiştirilir ve enkoder sinyal okumaya hazır duruma getirilir. Son olarak optik üniteleri maksadına uygun kimyasallar ile yıkanarak temizlenir, kurutulur, tekrar sinyalleri kontrol edilir ve enkoder motora takılmaya hazır hale getirilir.- Bu tespitlerin sonucunda servo motor mekanik kodları işaretlenmek suretiyle enkoder ve gövde kodları tespit edilip, servo motor açılır, rotor ve statörün iç muaneyeleri yapılır.
- Bu esnada motorun statöründeki mil üzerinde mekaniksel sorunlar olup olmadığını anlamak için rotor, balans makinesine bağlanır milde salgı olup olmadığı tespit edilir.
- Sırasıyla motorun rulman yatakları ölçülür, deforma olduğu durumda çeşitli mekanik işlemler sonucunda önce rulman yatakları ölçü ve değerlerinde kalibre edilir, rulman seçimi yapılır, rotor milinde salgı varsa balans yapılır, statorde manyetik alan kaybı varsa mıknatıslar üzerinde manyetik güçlendirme ve gerekli işlemler yapılır, statör sargıları kontrol edilir. Herhangi bir sorun varsa sargıların sarımı yapılır, sorun olmadığı durumda yeniden verniklerenek fırınlanır.
- Servo motor sökmeden önceki kodlamaya göre toplanmaya hazır duruma getirilir.
- Gövde toplandıktan sonra, servo motor üzerinde bulunan resorver veya enkoderin tamiri, bakımı ve kalibrasyonu yapılır.
- Bundan sonraki süreçte servo motor, sırasıyla elektriksel testlerden geçer, daha sonra manyetik alan testleri ve en son dinamik yük testleri yapılır.
- Servo motorun etiket değerlerine uygun, tork ve moment gücüne uygun olup olmadığı tespit edilir, daha sonra servo motorun çalıştırılması esnasında enkoder yada resolver pulseleri osilaskop testinden geçmek süretiyle uygun değerlerde olup olmadığı test edilir.
- Servo motorun üzerinde bulunan enkoder ve resorver’den uygun çalışma sinyalleri alınırsa, tamir ve rest işlemleri sonuçlanır.
BENZER ÜRÜNLER